角度制御 無段階のCCD回転を目指す
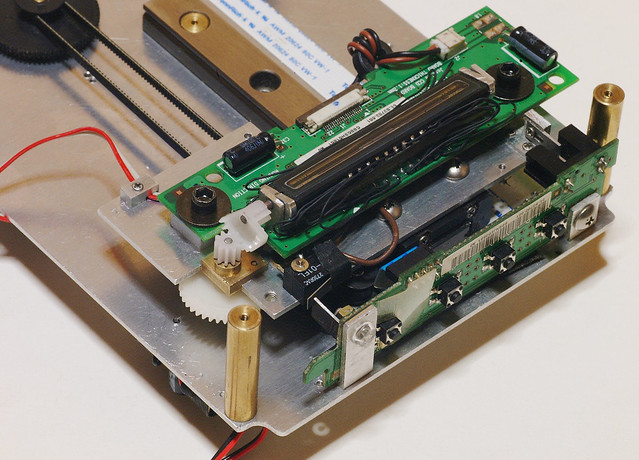
(写真1)これで3度目の動作システム変更です。意外とシンプルでコンパクトに組み込めました。オールアナログメカニック。
その後、ギアの組み込み中に計算ミスが発覚し、いろいろ手直ししてなんとかリンク出来るようになりました。こんな時にはギア計算ソフトがあると便利なのですが、余計な出費は出せません。おかげで一つ余計な穴を作ってしましましたが、これも実験機ということでこのまま進める事にします。今回は駆動ステージの直ぐ下を通っているタイミングベルトからギアの組み合せだけでリンクしています。最初からこの方法に気づいていればPIC制御は必要なかったかもしれませんが、アイデアというものはそう都合良く出てくるものではありません。いろいろ横道にそれながらも見えて来た事なのです。さて、駆動ステージとCCD基板の現在の姿です。(写真1)サーボモーターが無くなって随分すっきりしました。ギアの構成はこんな風になっています。(写真2)構造上ベルトと歯付きプーリーのスリップが懸念されますが、今のところスムーズに回っています。今後、場合によってはスリップ防止の装置を追加するかもしれません。また、この装置の追加によってベルトに負荷が掛かりますが、もともと6倍減速されたギアのトルクは充分余裕があるので問題はないでしょう。また、駆動ステージの下側にギアが入ったのでDC/DCコンバータは干渉を避けるために裏側に移動しました。構想図にもありますが、LEDの照明は基板の内側からの照明を考えていますが、これが最後の関門です。これさえクリアできれば、いよいよ完成も近いかもしれません。
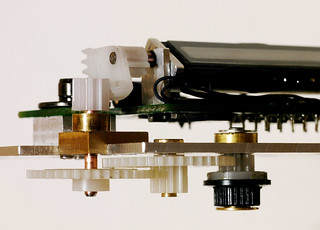
(写真2)歯数計算のミスもあって、所定の角度を出すのに手間取りました。
(Google translate English)